Report 20250901
论文:KITS
title: KITS: Inductive Spatio-Temporal Kriging with Increment Training Strategy
创新点
-
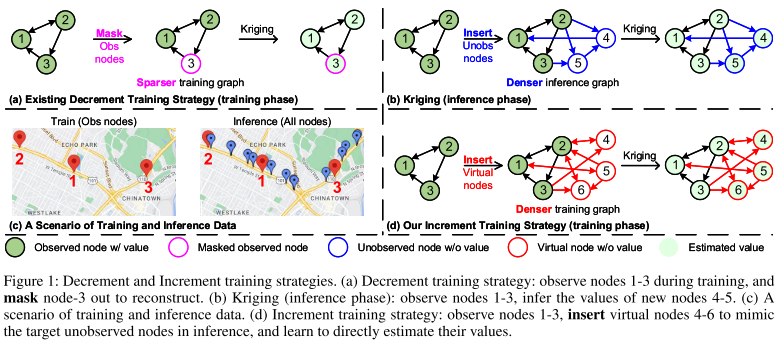
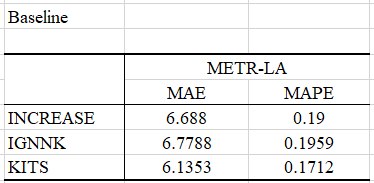
提出增量训练策略(Increment Training Strategy),解决 “图间隙” 问题:现有方法普遍采用减量训练策略(Decrement Strategy):在训练阶段仅基于观测节点构建图,通过 “掩盖部分观测节点值并重构” 模拟推理阶段的未观测节点。但该策略存在严重的图间隙问题—— 训练图仅包含观测节点(稀疏),而推理图包含观测 + 未观测节点(密集),两者节点数量、拓扑结构差异显著(实验显示训练图平均节点度比推理图低 70% 以上),导致模型泛化能力差。
-
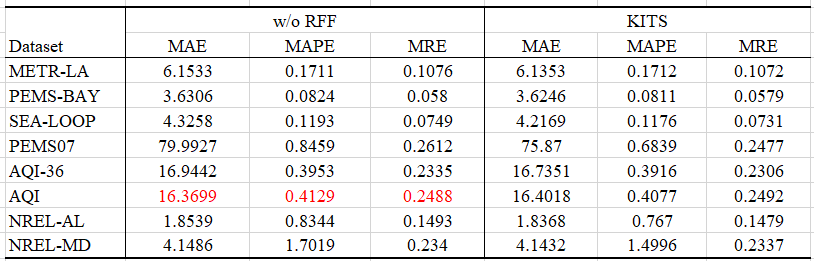
设计基于参考的特征融合模块(Reference-based Feature Fusion, RFF),解决 “特征质量差距” 问题:增量策略中,虚拟节点无真实标签,初始特征质量远低于观测节点,易导致 “观测节点过拟合、虚拟节点欠拟合”。RFF 通过 “节点对齐 + 特征融合” 弥合两者特征差距
-
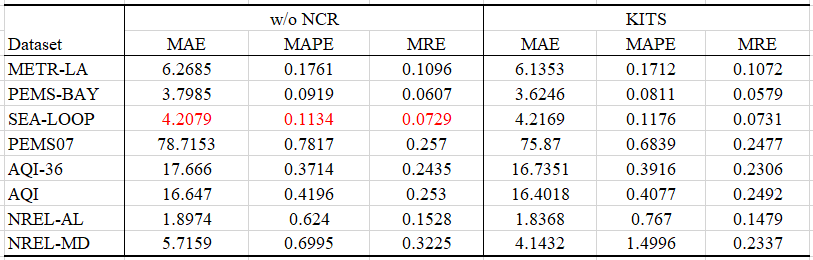
提出节点感知循环调节(Node-aware Cycle Regulation, NCR),为虚拟节点提供监督信号:虚拟节点无真实标签,缺乏训练监督,NCR 通过 “两次克里金推理 + 伪标签构建” 为虚拟节点注入可靠监督
模块构成
-
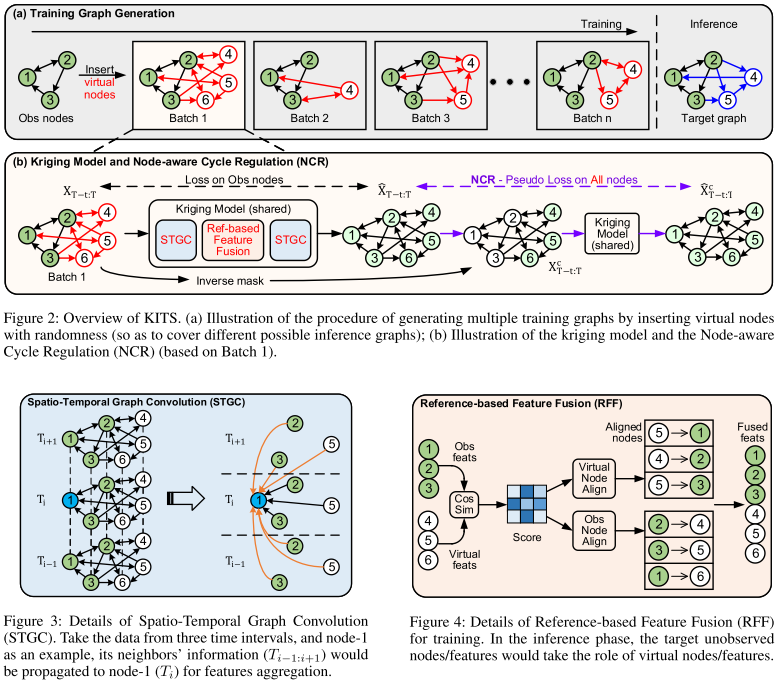
增量训练图生成模块:Training Graph Generation
- 构成:
- 输入:观测节点集合N_o、预估缺失率\alpha、观测节点邻接矩阵A^o;
- 步骤:
- 虚拟节点数量计算:计算虚拟节点数量N_v=\frac{\alpha·N_o}{1-\alpha}并初始化特征为0,并加入随机噪声\varepsilon已适配不同的缺失率场景,此时虚拟节点还没有真实值
- 虚拟节点连边规则:为每个虚拟节点随机选择一个观测节点作为“锚点”,并以均匀分布概率p\sim Uniform[0,1]与锚点的一阶邻居连边,按“锚边+随机连边”规则构建虚拟节点与观测节点的连边,生成扩展邻接矩阵A\in \mathbb{R}^{(N_o+N_v)\times (N_o+N_v)}
- 生成多批次不同的训练图,提升模型对推理图的适配性
- 作用
- 缩小训练图与推理图的拓扑差距,为后续模块提供贴近推理场景的训练数据
- 为什么虚拟节点是这样计算:
- 要尽可能保持训练阶段的缺失率和推理节点相同,定义损失率为\alpha
- 推理图中\alpha=\frac{N_u}{N_o+N_u},其中N_o是观测节点数,N_u是为观测节点数(要推理出的节点)
- 训练图中\alpha=\frac{N_v}{N_o+N_v},其中N_o是观测节点数,N_v是为虚拟节点数
- 所以N_v=\frac{\alpha·N_o}{1-\alpha}
- 随机噪声\varepsilon:
- 实际场景中推理节点的真是缺失率可能与预估值\alpha存在偏差,在计算N_v时加入小范围随机噪声:N_v=\frac{(\alpha+\varepsilon)·N_o}{1-(\alpha+\varepsilon)},其中\varepsilon\sim Uniform[-\delta,+\delta],其中\delta为噪声幅度,实验中设置为0.05

- 构成:
-
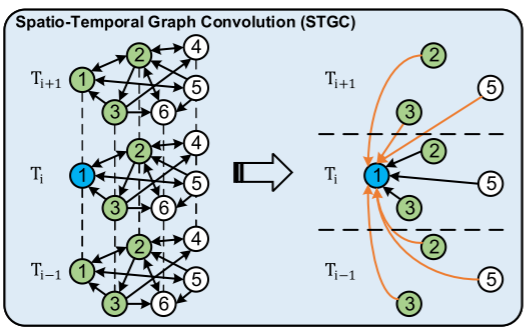
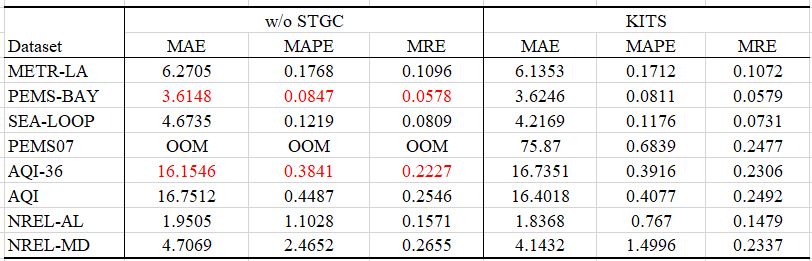
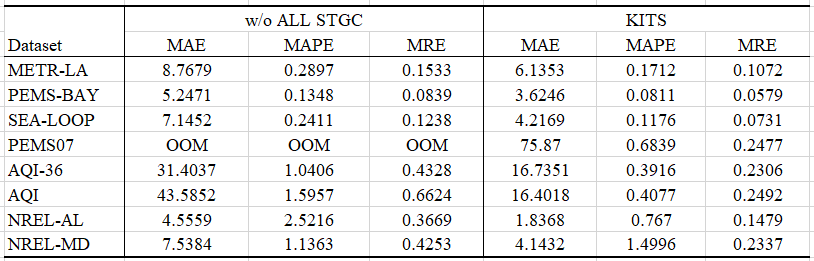
时空图卷积:STGC
- 步骤:
- 时间特征拼接:对第i个时间步的特征Z_i\in \mathbb{R}^{N\times D},拼接前后m个时间步的特征,得到Z_{i-m:i+m}\in \mathbb{R}^{N\times (2m+1)D},强化时间依赖
- D:单个节点在单个时间步的特征维度
- Z_i的每行对应一个节点在T_i时间步的特征向量
- 特征拼接方式:将T_{i-m}\sim T_{i+m}每个时间步的特征矩阵按照特征维度D拼接,得到Z_{i-m:i+m}\in \mathbb{R}^{N\times (2m+1)D}
- 无自环图卷积:掩盖邻接矩阵A的对角线元素(去除自环),得到A^-,避免节点从自身聚合特征(防止观测节点过拟合,虚拟节点欠拟合加剧)
- 特征聚合公式:Z_i^{(l+1)}=FC(GC(Z_{i-m:i+m}^{(l)},A^-)),其中GC(·)为归纳式图卷积(类似于\mathrm{GraphSAGE}),用于聚合空间特征,FC(·)为全连接层,用于调整特征维度
- 采用归纳式图卷积(GraphSAGE、GAT)而非转导式图卷积(如GCN),原因是:
- 克里金任务需要处理推理节点新增的未观测节点,转导式图卷积依赖于训练阶段固定节点集
- 归纳式图卷积通过“令居采样+局部聚合”,不依赖全局节点信息,可以处理动态节点集
- 步骤:
- 生成K阶空间支持矩阵(含正向、反向扩散及高阶邻居)(用于指导特征扩散)
- 基于支持矩阵迭代1-K阶邻居的时空特征
- 拼接多阶特征并通过1x1卷积映射到目标维度
- 采用归纳式图卷积(GraphSAGE、GAT)而非转导式图卷积(如GCN),原因是:
- 公式:
- 时间扩展: $ Z_{i-m:i+m}^{(l)}=\mathrm{Concat}(Z_{i-m}^{(l)},Z_{i-m+1}^{(l)},...,Z_{i+m}^{(l)})\in \mathbb{R}^{N\times (2m+1)D}$
- 空间聚合:Z_{spatial}^{(l)}=GC(Z_{i-m:i+m}^{(l)},A^-)\in \mathbb{R}^{N\times D_{spatial}}
- 特征调整:Z_i^{(l+1)}=FC(Z_{spatial}^{(l)})=\sigma(W·Z_{spatial}^{(l)}+b)\in \mathbb{R}^{N\times D_{target}},其中\sigma为\mathrm{ReLU}
- 时间特征拼接:对第i个时间步的特征Z_i\in \mathbb{R}^{N\times D},拼接前后m个时间步的特征,得到Z_{i-m:i+m}\in \mathbb{R}^{N\times (2m+1)D},强化时间依赖
- 步骤:
-
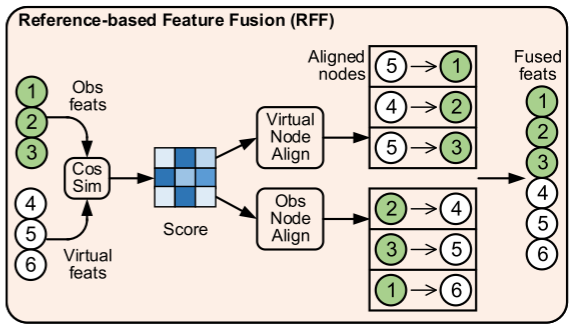
基于参考的特征融合:RFF
- 输入:STGC的输出的特征Z_i^{(l)}、观测节点集N^o、虚拟节点集N^v
- 输出:融合后的节点特征Z_i^{f_{used}},作为最终插值估计的基础
- 步骤:
- 计算相似度矩阵:基于余弦相似度计算观测节点与虚拟节点的相似度矩阵M_s\in[0,1]^{N_o\times N_v},量化节点间特征关联
- 节点双向对齐:对M_s的每行(观测节点)和每列(虚拟节点)分别取最大值,得到索引向量Ind^*,实现“每个虚拟节点匹配最相似的观测节点”“每个观测节点匹配最相似的虚拟节点”的双向对齐
- 特征加权融合:使用共享全连接层融合对齐节点的特征,并基于相似度向量S^*(M_s中的最大值)加权调整,公式如下:Z_i^v=FC(Z_i^v||S_i^*\odot Align(N^o,Ind^*)),其中Align(·)根据索引Ind^*提取最相似的观测节点的特征,\odot为元素积。该模块让虚拟节点借鉴观测节点的优质特征,同时避免观测节点过拟合。
- 公式:
- 余弦相似度:\mathrm{cos\_sim}(z_i^o,z_j^v)=\frac{z_i^o·z_j^v}{||z_i^o||_2\times ||z_j^v||_2},归一化到[0,1](加1除以2)
- 观测-虚拟节点双向对齐:
- 第j个虚拟节点的参考观测节点索引:Ind_v[j]=\mathrm{argmax}_{i\in[1,N_o]}M_{s[i,j]}
- 第j个虚拟节点与参考观测节点的相似度:S_v[j]=\mathrm{max}_{i\in[1,N_o]}M_{s[i,j]}
- 第i个观测节点的参考虚拟节点索引:Ind_o[i]=\mathrm{argmax}_{j\in[1,N_v]}M_{s[i,j]}
- 第i个观测节点与参考虚拟节点的相似度:S_o[i]=\mathrm{max}_{i\in[i,N_v]}M_{s[i,j]}
- 特征加权融合
- 虚拟节点特征融合:Z_j^{v,fused}=FC(Z_j^v||(S_v[j]\odot Z_{Ind_v[j]}^o))
- 观测节点特征融合:Z_i^{o,fused}=FC(Z_i^o||(S_o[i]\odot Z_{Ind_v[i]}^v))
- 输出融合特征
- 将所有虚拟节点的融合特征与观测节点的融合特征折整合,得到完整的节点融合特征矩阵Z^{fused}\in \mathbb{R}^{(N_o+N_v)\times D}
-
节点感知循环调节:NCR
- 作用:为虚拟节点提供伪标签监督,优化模型对未观测节点的插值精度
- 步骤:
- 第一次推理(生成初始伪标签):输入观测节点数据X_{T-t:T},通过克里金模块得到所有节点(观测节点+虚拟节点)的估计值\hat{X}_{T-t:T},将虚拟节点的估计值作为初始伪标签
- 角色互换(构建反向掩码):使用反向掩码(1-M_{T-t:T})(M为原始掩码,1表示观测节点),将虚拟节点的伪标签作为观测值,观测节点的真实值掩盖,得到X_{T-t:T}^c
- 第二次推理(循环调节):基于X_{T-t:T}^c再次运行克里金模型,得到\hat{X}_{T-t:T}^c,通过两次估计值的MAE损失(伪标签损失)约束虚拟节点训练
- 总损失函数:结合观测节点的真是标签损失与伪标签损失,公式如下:L=MAE(\hat{X}_{T-t:T},X_{T-t:T},I_{obs})+\lambda·MAE(\hat{X}_{T-t:T}^c,X_{T-t:T}^c,I_{all})

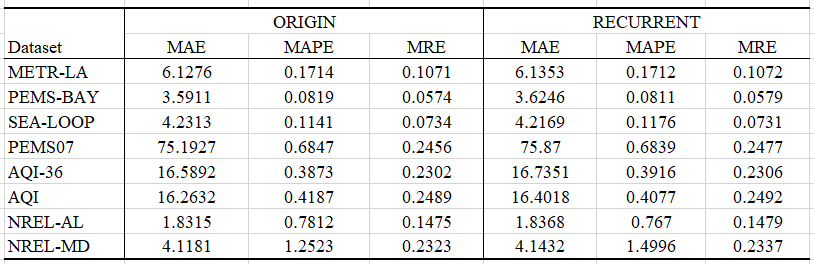
实验部分
KITS
Ablation
Baseline
hyperparameter