Report 20250804
论文:FC-STGNN
title: Fully-Connected Spatial-Temporal Graph for Multivariate Time-Series Data
创新点
- 将所有时间戳的传感器进行全连接,通过传感器特征的点积计算相关性,直接建模 DEDT 依赖
- 引入衰减矩阵(Decay Matrix),基于时间距离调整相关性权重,使图结构更符合实际时空规律
- 设计移动池化 GNN 层(Moving-Pooling GNN),高效捕捉局部时空依赖
- 实现对多元时间序列数据中 “全面时空依赖” 的建模
模块构成
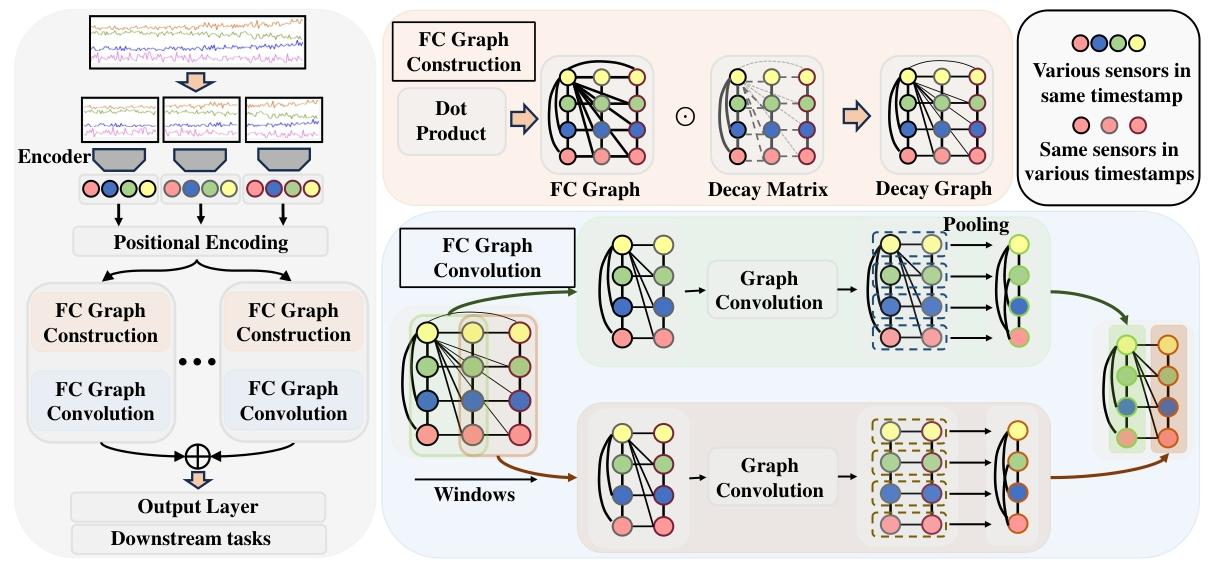
- 输入预处理模块
- 数据分块处理:将每个传感器捕获到的时序信号分割为多个连续局部片段(文中称为patch),每个patch对应一个时间戳
- 传感器级编码:使用1D-CNN作为传感器级编码,将每个patch中的信号进行编码,作用是学习传感器的局部(patch内的)时序特征
- 位置编码:引入类似Transformer的位置编码(正弦余弦位置编码),作用是保留patch之间的时间顺序信息
- 优点:
- 保留局部时序模式:分块操作聚焦于传感器信号的局部片段,避免长时序带来的噪声干扰
- 显式时间位置:位置编码确保模型能区分不同时间戳的 patch,为时间依赖建模奠定基础
-
FC 图构建模块
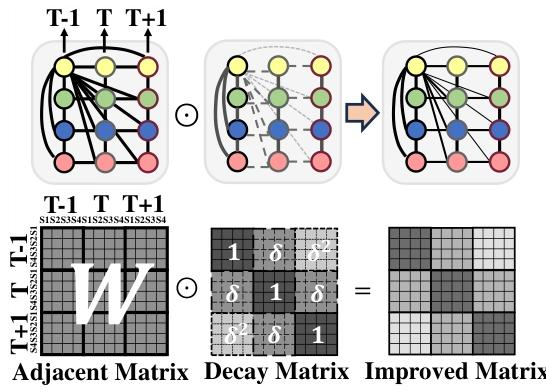
- 全连接图初始化:通过点积计算任意两个传感器的相关性$ e_{tr,ij}=g_s(z_{t,i})·(g_s(z_{r,j}))^T ,其中g_s(z)=zW_s(W_s可学习),t,r为patch索引,i,j为传感器索引,并通过softmax归一化到[0,1]$,形成初始的邻接矩阵
- 衰减矩阵(Decay Matrix):引入衰减矩阵C,c_{tr,ij}=δ^{|t-r|} ,其中δ∈(0,1]为衰减率。最终的邻接矩阵为e_{tr,ij}=e_{tr,ij}·c_{tr,ij},作用是引入时间距离的影响,使时间距离更近的传感器相关性更强
-
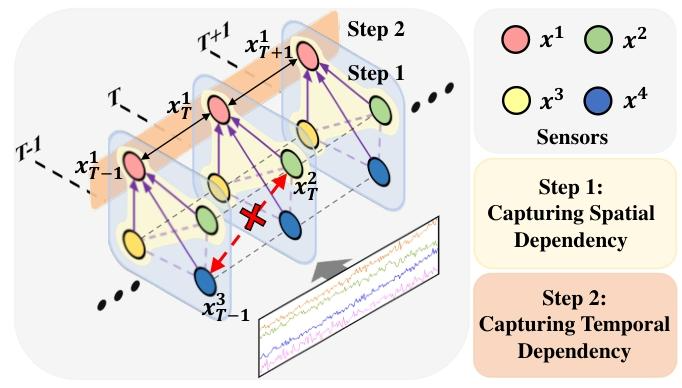
该模块构建了三种全连接图:
- 同patch内传感器的空间依赖(t=r)
- 不同patch同一传感器的时间依赖(t \neq r ,i=j)
- 不同patch不同传感器的DEDT依赖(Different sEnsors at Different Timestamps)(t \neq r ,i \neq j)
-
优点:
- DEDT依赖解决了时空依赖建模不完整的问题
- 衰减矩阵使相关性更符合实际物理规律
- DEDT依赖解决了时空依赖建模不完整的问题
-
FC图卷积模块
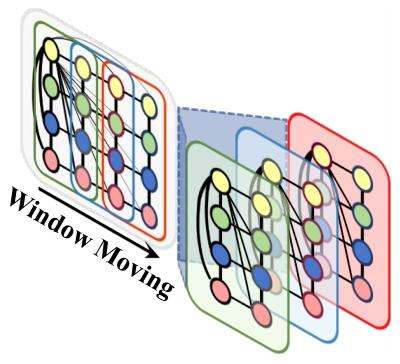
- 滑动窗口:使用大小为M的窗口在patch序列上滑动(步长为s)
-
窗口内图卷积:对窗口内的子图才用消息传递神经网络(MPNN)进行卷积:
- 信息传播:中心节点z_{t,i}^l(第l层)聚合窗口内所有的邻居节点的特征,h_{t,i}^l=\sum_{r\in窗口}\sum_{j=1}^Nz_{r,j}^l·e_{tr,ij}^l,其中e_{tr,ij}^l为窗口内的归一化相关性权重
- 特征更新:通过非线性函数更新特征:z_{t,i}^{l+1}=f_g(h_{t,i}^l|W_g),W_g为可学习,f_g为\mathrm{ReLu}
- 时间池化:对窗口内所有patch的传感器特征进行平均池化,得到窗口级高层特征z_{w,i}^{l+1}=\frac{1}{M}\sum_{t\in窗口}z_{t,i}^{l+1},其中w为窗口索引
- 并行多层:多个并行的移动池化GNN层(使用不同的值初始化权重),从不同的视角捕捉时空依赖,最终拼接所有层的输出特征
-
优点:
- 使用滑动窗口,重点关注局部依赖,避免全局卷积造成大量运算
- 时间池化压缩窗口内的时序信息,减少特征维度和计算消耗
- 多并行层通过不同权重初始化捕捉多样化依赖,提升模型对复杂数据的适应能力
- MPNN 消息传递机制适配图结构,能有效利用全连接图中的相关性权重
- 滑动窗口:使用大小为M的窗口在patch序列上滑动(步长为s)
-
输出层
- 将前一个模块多个并行层拼接的特征通过MLP映射为最终结果:h=\mathrm{MLP}(\mathrm{Concat}(z_w^1,z_w^2,...,z_w^K)),K为并行层数
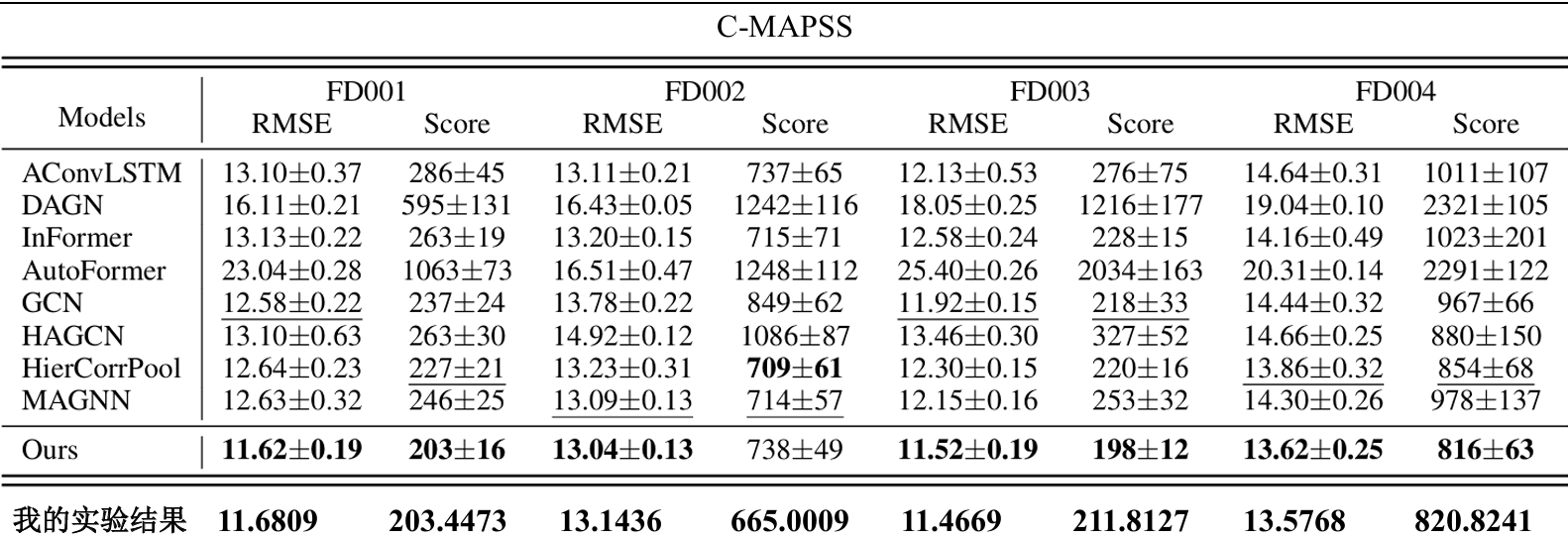
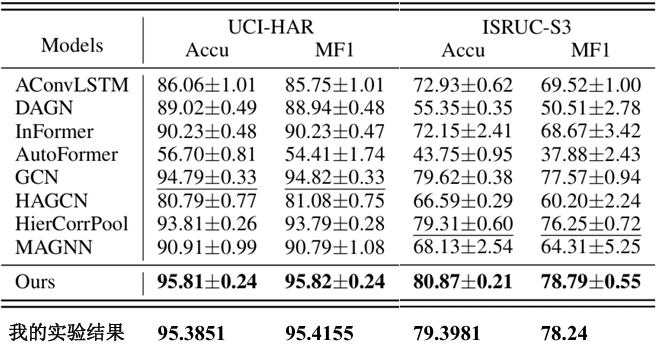
实验部分
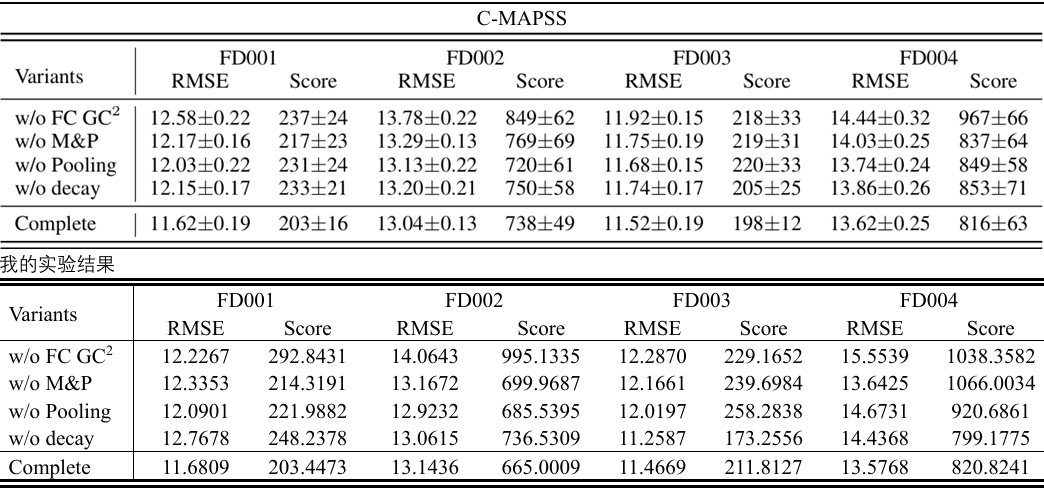
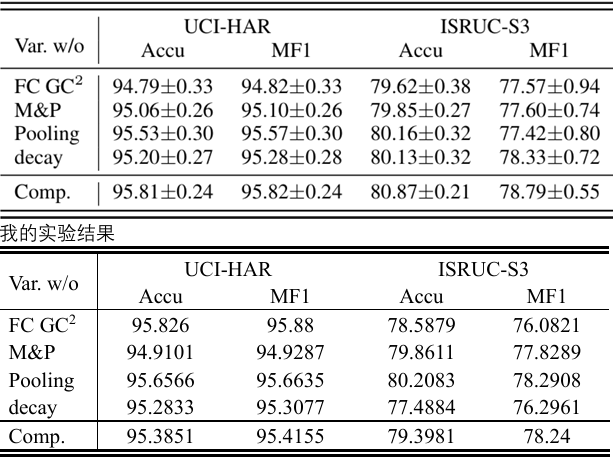
实验结果复现:
消融实验: